
Når nye fotografer begynder at efterbehandle deres billeder, anvender de typisk skarphed globalt på hele billedet. Men der er tidspunkter, hvor det er nødvendigt at anvende skarphed mere selektivt. En teknik, der benytter denne tilgang, er kantskarphed, hvor skarpheden er begrænset til kun billedets kanter. Dette kan være perfekt for visse motiver, da kanterne forbedres uden at påvirke områder med kontinuerlig tone, såsom himlen. At forstå, hvordan software identificerer disse kanter, er nøglen til at mestre sådanne selektive teknikker.
https://www.youtube.com/watch?v=0gcJCdgAo7VqN5tD
Et typisk billede, der drager fordel af kantskarphed, indeholder mange kanter, der skal forbedres for at definere detaljerne. Samtidig ønsker vi ikke at påvirke udseendet af områder mellem kanterne. Men hvad er kantdetektion egentlig, og hvordan fungerer det?
Hvad er Kantdetektion i Billeder?
Kantdetektion er en grundlæggende billedbehandlingsteknik til at identificere og lokalisere grænserne eller kanterne af objekter i et billede. Den bruges til at identificere diskontinuiteter i billedets intensitet og udtrække omridset af objekter. Kanterne af ethvert objekt i et billede defineres typisk som de regioner, hvor der er en pludselig ændring i intensitet. Målet med kantdetektion er at fremhæve disse regioner.
I ideelle tilfælde kan resultatet af anvendelse af en kantdetektor på et billede føre til et sæt forbundne kurver, der angiver grænserne for objekter, grænserne for overflademarkeringer samt kurver, der svarer til diskontinuiteter i overfladeorientering. Anvendelse af en kantdetektionsalgoritme kan derfor reducere mængden af data, der skal behandles, betydeligt og filtrere mindre relevant information fra, samtidig med at vigtige strukturelle egenskaber bevares. Hvis kantdetektionstrinnet er succesfuldt, kan den efterfølgende opgave med at fortolke informationen i det originale billede forenkles væsentligt. Det er dog ikke altid muligt at opnå sådanne ideelle kanter fra virkelige billeder af moderat kompleksitet.
Formålet med at detektere skarpe ændringer i billedets lysstyrke er at fange vigtige begivenheder og ændringer i verdens egenskaber. Diskontinuiteter i billedets lysstyrke svarer sandsynligvis til grænser mellem objekter med forskellige overfladeegenskaber, diskontinuiteter i overfladeorientering, ændringer i belysning eller overflademarkeringer.
En typisk kant kan for eksempel være grænsen mellem en blok af rød farve og en blok af gul. I modsætning hertil kan en linje (som kan udtrækkes af en rilledetektor) være et lille antal pixels af en anden farve på en ellers uændret baggrund. For en linje kan der derfor sædvanligvis være en kant på hver side af linjen.
Kanterne udvundet fra et todimensionelt billede af en tredimensionel scene kan klassificeres som enten synspunkt-afhængige eller synspunkt-uafhængige. En synspunkt-uafhængig kant afspejler typisk iboende egenskaber ved de tredimensionelle objekter, såsom overflademarkeringer og overfladeform. En synspunkt-afhængig kant kan ændre sig, når synspunktet ændres, og afspejler typisk scenens geometri, såsom objekter, der overlapper hinanden.
Kantdetektionskoncepter
For at forstå kantdetektion er der et par centrale koncepter, der er vigtige at kende:
Kantmodeller
Kantmodeller er teoretiske konstruktioner, der bruges til at beskrive og forstå de forskellige typer af kanter, der kan forekomme i et billede. Disse modeller hjælper med at udvikle algoritmer til kantdetektion ved at kategorisere typerne af intensitetsændringer, der signalerer kanter. De grundlæggende kantmodeller er Step, Ramp og Roof. En step edge repræsenterer en brat ændring i intensitet, hvor billedets intensitet skifter fra én værdi til en anden i et enkelt trin. En ramp edge beskriver en gradvis overgang i intensitet over en vis afstand, snarere end en brat ændring. En roof edge repræsenterer en top eller en ryg i intensitetsprofilen, hvor intensiteten stiger til et maksimum og derefter falder.
Billedintensitetsfunktion
Billedintensitetsfunktionen repræsenterer lysstyrken eller intensiteten af hver pixel i et gråtonebillede. I et farvebillede kan intensitetsfunktionen udvides til at omfatte flere kanaler (f.eks. rød, grøn, blå i RGB-billeder). En skarp variation af intensitetsfunktionen over en del af et 2D gråtonebillede indikerer typisk en kant.
Første og Anden Afledede
Den første afledede af et billede måler ændringshastigheden af pixelintensitet. Den er nyttig til at detektere kanter, fordi kanter er steder i billedet, hvor intensiteten ændrer sig hurtigt. Den detekterer kanter ved at identificere betydelige ændringer i intensitet. Den første afledede kan tilnærmes ved hjælp af gradientoperatorer.
Den anden afledede måler ændringshastigheden af den første afledede. Den er nyttig til at detektere kanter, fordi nulgennemgange (punkter, hvor den anden afledede skifter fortegn) ofte svarer til kanter. Den detekterer kanter ved at identificere nulgennemgange i ændringshastigheden af intensitet. Den anden afledede kan tilnærmes ved hjælp af Laplace-operatoren.
Metoder til Kantdetektion
Der findes mange metoder til kantdetektion, men de fleste kan grupperes i to kategorier: søgebaserede og nulgennemgangsbaserede. De søgebaserede metoder detekterer kanter ved først at beregne et mål for kantstyrke, sædvanligvis et førsteordens afledt udtryk som gradientens størrelse, og derefter søge efter lokale retningsbestemte maksima af gradientens størrelse ved hjælp af et beregnet estimat af kantens lokale orientering, sædvanligvis gradientens retning. De nulgennemgangsbaserede metoder søger efter nulgennemgange i et andetordens afledt udtryk beregnet ud fra billedet for at finde kanter, sædvanligvis nulgennemgangene af Laplace-operatoren.
Som et forbehandlingstrin til kantdetektion anvendes næsten altid en udglatningsfase, typisk Gaussisk udglatning (se også støjreduktion).
Kantdetektionsmetoderne, der er blevet publiceret, adskiller sig hovedsageligt i de typer af udglatningsfiltre, der anvendes, og måden, hvorpå målene for kantstyrke beregnes. Da mange kantdetektionsmetoder er afhængige af beregningen af billedgradienter, adskiller de sig også i de typer af filtre, der bruges til at beregne gradientestimater i x- og y-retningerne.
Søgebaserede Metoder (Gradient-baserede)
Gradient-baserede metoder identificerer kanter ved at finde steder, hvor intensiteten ændrer sig mest markant. De beregner billedets gradient ved hvert punkt, hvilket indikerer både ændringens størrelse og retning. En stor gradientstørrelse indikerer en stærk kant. Forskellige operatorer bruger forskellige små matrixer (kaldet kerner eller filtre) til at beregne disse gradienter ved at 'konvolvere' dem med billedet.
- Sobel-operatoren: En populær gradient-baseret metode, der bruger to 3x3 kerner til at beregne gradienter i vandret og lodret retning. Disse kerner er designet til at fremhæve ændringer i intensitet i x- og y-retningen.
- Prewitt-operatoren: Ligesom Sobel bruger Prewitt to 3x3 kerner til vandrette og lodrette gradienter. Kernerne er lidt anderledes end Sobels, men princippet er det samme – at detektere intensitetsændringer.
- Roberts Cross-operatoren: En simplere metode, der bruger to 2x2 kerner. Den er effektiv til at detektere tynde kanter, men kan være mere følsom over for støj på grund af de mindre kerner.
- Scharr-operatoren: En forbedring af Sobel-operatoren, der giver bedre rotationel symmetri og mere præcis kantdetektion. Den bruger også 3x3 kerner, men med andre vægte end Sobel.
Nulgennemgangsbaserede Metoder (Andetordens Afledede)
Disse metoder søger efter steder, hvor den anden afledede af billedets intensitet passerer nul. Dette sker typisk ved lokale maksima i den første afledede (gradienten), hvilket indikerer kanter.
- Laplace-operatoren: Bruger den anden afledede til at detektere kanter. Den anvendes ofte efter Gaussisk udglatning for at reducere støj. Kanter identificeres ved nulgennemgange i det filtrerede billede.
- Marr-Hildreth-detektoren: En kendt metode baseret på Laplace af Gauss (LoG) operatoren. Den kombinerer Gaussisk udglatning med Laplace-operatoren. En nøglefordel er evnen til at detektere kanter på forskellige skalaer ved at justere Gauss-kernens standardafvigelse. Kanter lokaliseres præcist ved nulgennemgange i LoG-responsen.
Multistage Algoritmer
Nogle algoritmer kombinerer flere trin for at opnå mere robuste og præcise resultater.
- Canny Edge Detection: En meget anerkendt multistage algoritme, der er kendt for sine optimale kantdetektionsegenskaber. Den følger en række trin:
- Støjreduktion ved hjælp af Gaussisk udglatning.
- Gradientberegning (typisk ved hjælp af Sobel-lignende operatorer).
- Non-Maximum Suppression: Udtynding af kanterne ved kun at beholde lokale maksima i gradientretningen.
- Double Thresholding: Klassificering af kanter i stærke, svage og ikke-kanter baseret på to tærskler (høj og lav).
- Edge Tracking by Hysteresis: Forbindelse af svage kanter til stærke kanter for at bevare ægte kanter og fjerne støj.
Canny-detektoren (inklusive dens variationer) betragtes stadig som en state-of-the-art kantdetektor.
- Canny–Deriche-detektoren: Afledt fra lignende matematiske kriterier som Canny, men starter fra et diskret synspunkt og fører til rekursive filtre.
Andre Metoder
Den leverede information nævner også andre, mere avancerede tilgange:
- Kovalevsky-metoden: En anden tilgang, der bruger forbehandling med et Sigma-filter og et specielt filter til udtynding af 'ramps'. Den kan detektere kanter mellem tilstødende pixels med samme lysstyrke, men forskellige farver, hvilket er vigtigt.
- Differentielle Metoder: En mere raffineret tilgang baseret på andenordens retningsbestemte afledte i gradientretningen. Kan detektere kanter med sub-pixel præcision.
- Fasekongruens-baserede metoder: En frekvensdomæne-tilgang, der forsøger at finde steder i et billede, hvor alle sinusoider i frekvensdomænet er i fase. Disse steder svarer generelt til placeringen af en opfattet kant, uanset om kanten repræsenteres af en stor ændring i intensitet i det rumlige domæne.
- Phase Stretch Transform (PST): En fysik-inspireret beregningsmetode, der emulerer udbredelse gennem et diffraktivt medie. Bruges til feature-detektion og klassifikation.
- Subpixel Kantdetektion: Teknikker designet til at øge præcisionen af kantdetektion ud over pixel-niveauet. Omfatter metoder baseret på kurvetilpasning, momenter, rekonstruktion og partial area effect.
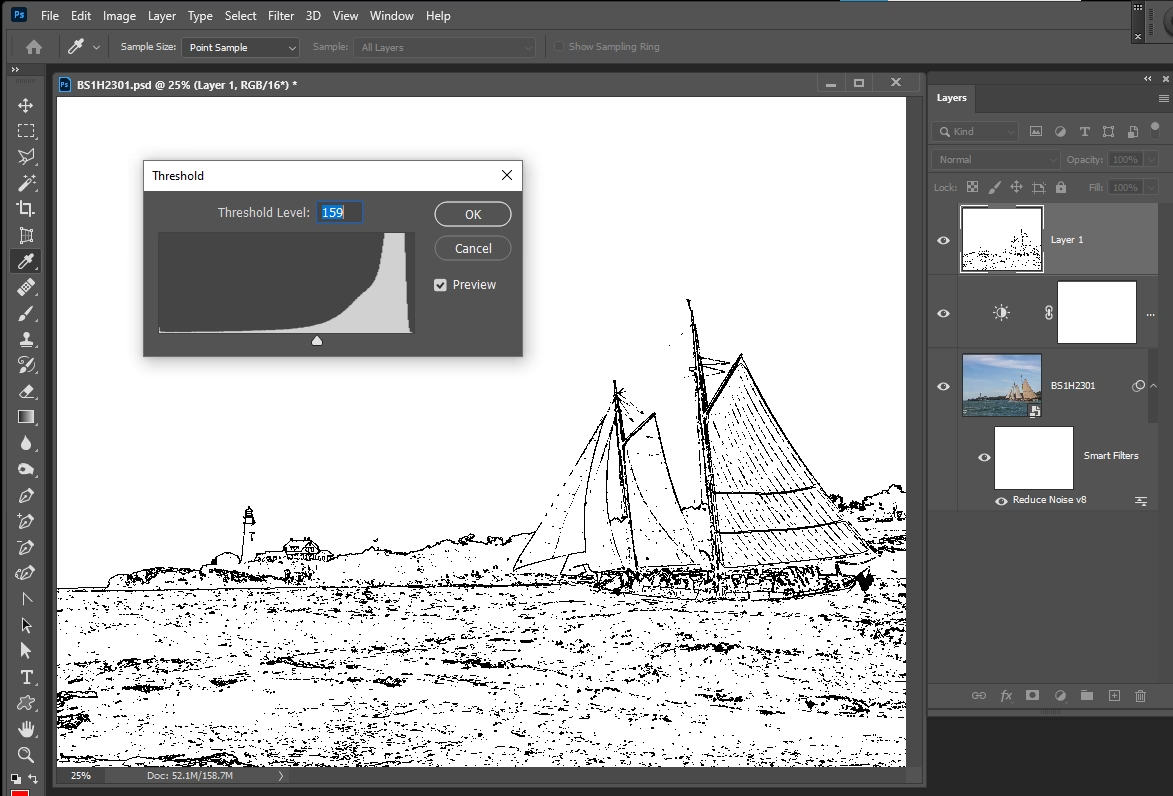
Tærskelværdi og Sammenkædning
Når et mål for kantstyrke er beregnet (typisk gradientens størrelse), er næste trin at anvende en tærskelværdi for at beslutte, om kanter er til stede eller ej ved et billedpunkt. Jo lavere tærsklen er, jo flere kanter detekteres, og resultatet vil være stadig mere modtageligt for støj og detektion af kanter af irrelevante træk. Omvendt kan en høj tærskel overse subtile kanter eller resultere i fragmenterede kanter.
Hvis kantdetektionen kun anvendes på gradientstørrelsesbilledet, vil de resulterende kanter generelt være tykke, og en form for kantudtynding efterbehandling er nødvendig. For kanter detekteret med non-maximum suppression er kantkurverne dog tynde per definition, og kantpixels kan kædes sammen til kantpolygoner ved hjælp af en kantforbindelsesprocedure.
En ofte anvendt tilgang til at håndtere problemet med passende tærskler er ved hjælp af tærskelværdi med hysteresis. Denne metode bruger flere tærskler til at finde kanter. Man starter med at bruge den øvre tærskel til at finde starten på en kant. Når et startpunkt er fundet, spores kantens vej gennem billedet pixel for pixel, idet en kant markeres, når værdien er over den lavere tærskel. Markeringen stoppes kun, når værdien falder under den lavere tærskel. Denne tilgang antager, at kanter sandsynligvis findes i kontinuerlige kurver, og tillader at følge en svag del af en tidligere set kant, uden at hvert støjende pixel markeres som en kant.
Kantudtynding
Kantudtynding er en teknik, der bruges til at fjerne uønskede falske punkter på kanterne i et billede. Denne teknik anvendes, efter at billedet er filtreret for støj, kantoperatoren er anvendt til at detektere kanterne, og kanterne er udglattet ved hjælp af en passende tærskelværdi. Dette fjerner alle uønskede punkter og resulterer, hvis det anvendes omhyggeligt, i kantelementer, der kun er én pixel tykke.
Anvendelse af Kantdetektion
Kantdetektion er et nøglestadie i mange computer vision-applikationer. Ud over selektiv kantskarphed i fotoredigering, som forbedrer visuel appel ved at fremhæve strukturer, bruges det også til:
- Billedsegmentering: Opdeling af et billede i separate regioner baseret på objektgrænser.
- Feature Extraction: Udtrækning af specifikke træk som hjørner eller linjer til yderligere analyse.
- Objektdetektion og -genkendelse: Identifikation af objekter baseret på deres omrids.
- Bevægelsesanalyse: Spore objekters bevægelse over tid ved hjælp af deres kanter.
Et konkret eksempel, der illustrerer kraften i kantdetektion, er detektering af revner i betonkonstruktioner. Ved at anvende kantdetektionsalgoritmer på billeder af betonoverflader kan man effektivt identificere og analysere revner, hvilket er kritisk for strukturel sundhedsovervågning. Dette viser, hvordan teknikken kan bruges til at udtrække vigtig information fra billeder.
Opsummering af Populære Metoder
| Metode | Grundlag | Kendetegn |
|---|---|---|
| Sobel | Første afledede (gradient) | Enkel, almindeligt anvendt, detekterer stærke kanter. |
| Prewitt | Første afledede (gradient) | Ligner Sobel, bruges også til at detektere gradienter. |
| Roberts Cross | Første afledede (gradient) | Enkel, detekterer tynde kanter, følsom over for støj. |
| Scharr | Første afledede (gradient) | Forbedring af Sobel, bedre præcision. |
| Laplace | Anden afledede (nulgennemgange) | Detekterer intensitetsændringer, ofte brugt efter udglatning. |
| Canny | Multistage (udglatning, gradient, non-maximum suppression, hysteresis) | Optimal, robust, tynde kanter, mindre følsom over for støj. |
| Marr-Hildreth | Laplace af Gauss (LoG) | Detekterer nulgennemgange i LoG, kan arbejde på forskellige skalaer. |
Ofte Stillede Spørgsmål om Kantdetektion
- Hvad er den vigtigste forskel mellem Sobel og Canny?
- Sobel er en simpel gradient-baseret metode, der direkte beregner gradientens størrelse. Canny er en mere kompleks multistage-algoritme, der inkluderer støjreduktion, non-maximum suppression og hysteresis-tærskelværdi for at opnå tyndere og mere robuste kanter, der er mindre påvirket af støj.
- Hvorfor er Gaussisk udglatning ofte det første skridt?
- Gaussisk udglatning anvendes for at reducere støj i billedet, før kantdetektion udføres. Støj kan skabe falske kanter (artefakter) eller påvirke nøjagtigheden af kantdetektionen. Udglatning hjælper med at sikre, at kun signifikante intensitetsændringer detekteres som kanter.
- Hvad betyder 'Non-Maximum Suppression'?
- Non-Maximum Suppression er et trin, der udtynder de detekterede kanter. Det sikrer, at kun pixels, der repræsenterer et lokalt maksimum i gradientretningen, bevares som kantpixels. Dette resulterer i kanter, der er kun én pixel brede i den ideelle situation.
- Hvordan hjælper 'Hysteresis Thresholding' med kantdetektion?
- Hysteresis Thresholding bruger to tærskler (en høj og en lav) til at klassificere kanter. Stærke kanter (over den høje tærskel) bevares altid. Svage kanter (mellem de to tærskler) bevares kun, hvis de er forbundet til en stærk kant. Dette hjælper med at forbinde segmenter af en kant og reducere falske detektioner forårsaget af støj.
- Kan kantdetektion bruges til farvebilleder?
- Ja, selvom mange grundlæggende metoder opererer på gråtonebilleder, kan kantdetektion anvendes på farvebilleder. Dette gøres typisk ved at anvende metoden separat på hver farvekanal (R, G, B) eller ved at konvertere billedet til et andet farverum (f.eks. HSL) og anvende detektion på intensitets- eller luminanskanalen.
Konklusion
Kantdetektion er et afgørende værktøj i digital billedbehandling og computer vision, der muliggør identifikation af grænser mellem forskellige områder i et billede. Ved at detektere variationer i intensitet, farve eller tekstur, der svarer til objektgrænser, kan software hjælpe fotografer med at forbedre deres billeder. Metoder som Canny-detektoren, Sobel-operatoren og Laplace af Gauss-operatoren tilbyder forskellige tilgange til denne opgave, hver med sine styrker.
Forståelsen af disse principper bag kantdetektion er værdifuld for fotografer, da det kaster lys over, hvordan redigeringssoftware kan udføre opgaver som selektiv skarphed eller oprette præcise markeringer baseret på billedets struktur. Ved at udnytte kantinformation kan man opnå mere målrettede og effektive billedjusteringer, hvilket fører til mere professionelle og visuelt tiltalende resultater. Selvom den dybdegående implementering ofte kræver programmering, er den konceptuelle forståelse af, hvordan kanter detekteres, fundamental for enhver, der ønsker at mestre digital billedredigering.
Hvis du vil læse andre artikler, der ligner Kantdetektion: Skarphed og Detaljer i Fotos, kan du besøge kategorien Fotografi.